


„Lernalgorithmen sind bisher in der digitalen Welt verortet, primär in Computerspielen. Diese Computer Spiele kann man beliebig oft auf Supercomputern vervielfältigen und damit unendlich viele Daten generieren. Hier haben Entscheidungen, die von künstlicher Intelligenz getroffen werden, zunächst keine fatalen Konsequenzen, weil es in der Regel um Simulationen bestimmter Zusammenhänge geht.
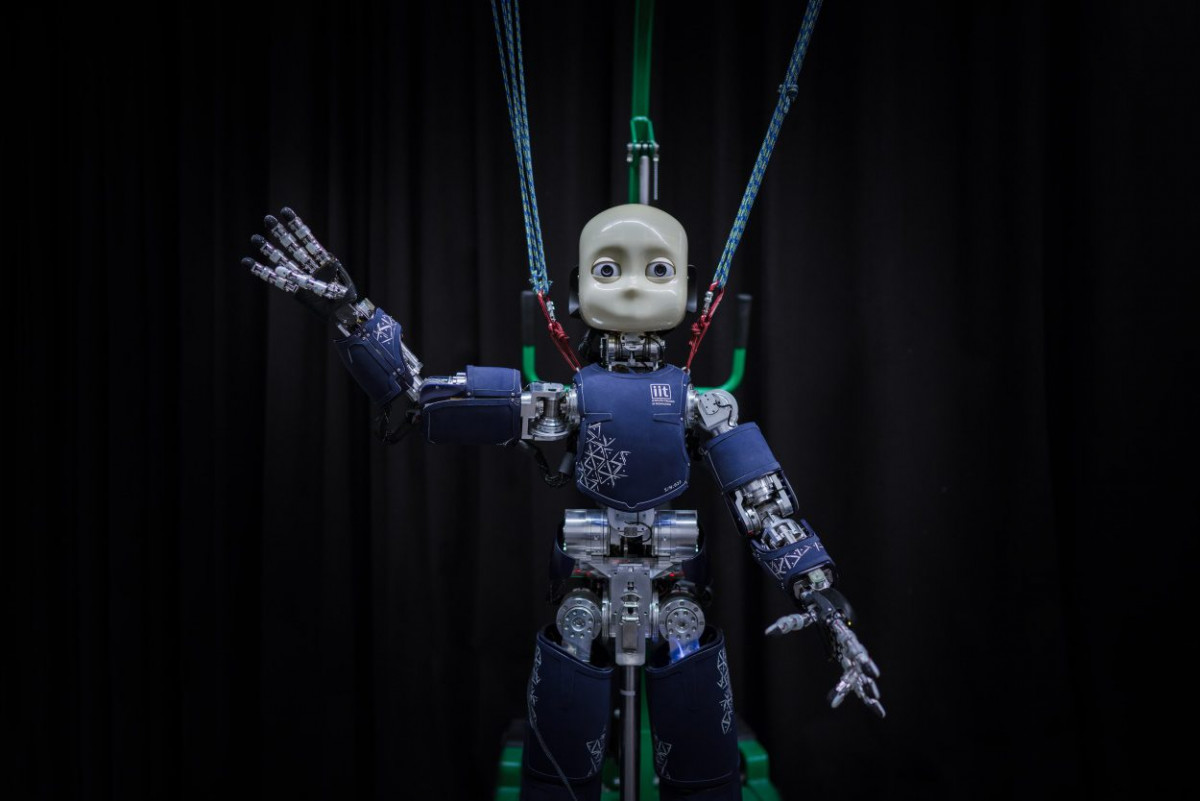
In der Robotertechnik sieht das komplett anders aus. Wenn ein Roboter Fehler macht, dann kann das fatale Folgen haben, weil sich dieser Fehler in der physischen Welt verortet. Wenn beispielsweise ein Roboter durch einen Fehler in einer Produktionsanlage eine komplette Produktionsstrecke lahmlegt, dann hat das große wirtschaftliche Folgen. Und wenn wir weiter in die Zukunft denken und uns mit dem Einsatz von Robotern in Pflege- und Altenheimen beschäftigen, dann könnte ein Fehler unter Umständen sogar eine Gefahr für Leib und Leben der Patienten darstellen. Für solche Einsatzzwecke brauchen wir nicht nur sichere, sondern vor allem robuste Algorithmen. Wir beschäftigen uns hier in unserem Fachbereich mit der Frage, wie sich Lernalgorithmen auf Roboter in der physikalischen Welt anwenden lassen.“




